有限公司")



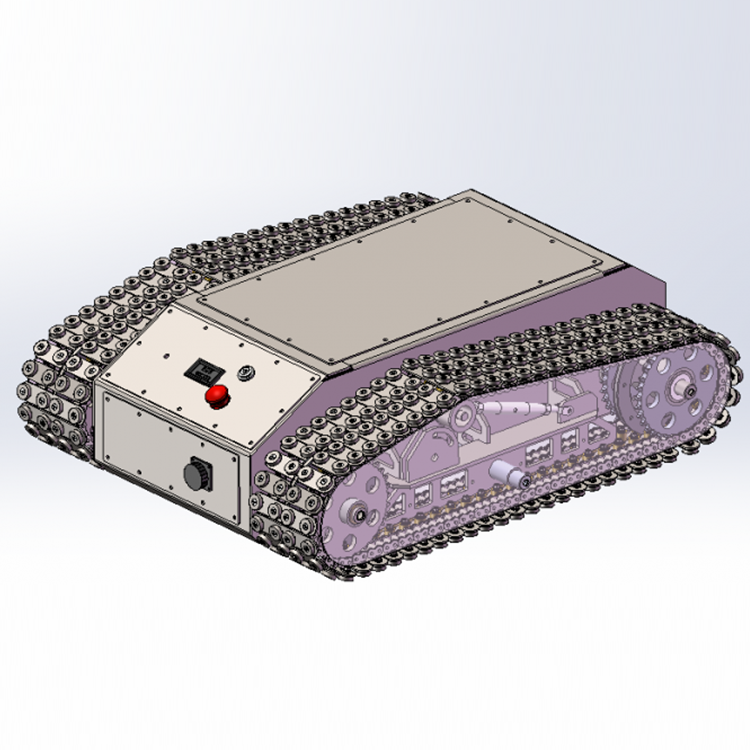
液压履带底盘作业原理基本是这样的:液压履带底盘在车轮的外表面环绕循环履带,使得车轮不用直接与地面触摸,较好的保护车轮。是循环履带直接与地面触摸冲突,在启动之后,通过驱动轮带动履带,当车轮在履带上依照唆使方向翻滚时,履带会先一步扑在地面上,然后车子能正常行进。液压履带底盘所选用的规划办法其实便是在模仿坦克,便是在底盘的两侧设置一对可以驱动的双履带,每个履带组织上都独立装置一个驱动轮,使得每个部位都严密相连,在驱动时共同带动车轮向前移动。
相信对液压履带底盘都很了解吧,可是在运用的过程中会出现跑偏的现象,那么究竟为什么会出现这种现象呢?下面由磁吸机器人生产厂家小编来给大家简略介绍一下其相关知识点。
1、检查液压履带底盘的行走马达,由于行走马达的缺点率高。
2、直观的办法是将左、右行走马达进油口管路文换,若跑偏方向不变,则可断定马达有缺点,否则,马达没有缺点。电机的首要缺点工作中的通风孔大,电机需求翻开排水口检查,正常的状态应该是缓慢溢出。
3、接下来是行走制动阀,主换向阀。检测办法与步行电机根本相似。差异在于承认阀杆和阀座的加工公役是否在答应范围内。假设超过了公役,内走漏量会很大,导致两台电机之间的流量差异很大,也会出现违反现象。
4、先导手栖、回转接头、校阀先导手柄、回转接头、梭阀的检查办法根本同前所述。
5、主泵出现缺点的概率较小,但其内泄严峻时也会使液压履带底盘两头行走马达的供油不同,然后造成跑偏。
以上便是液压履带底盘的相关知识点,期望以上的内容可以对您有所帮助,感谢您的观看和支持,后期会有更多资讯,敬请关注网站更新。