有限公司")



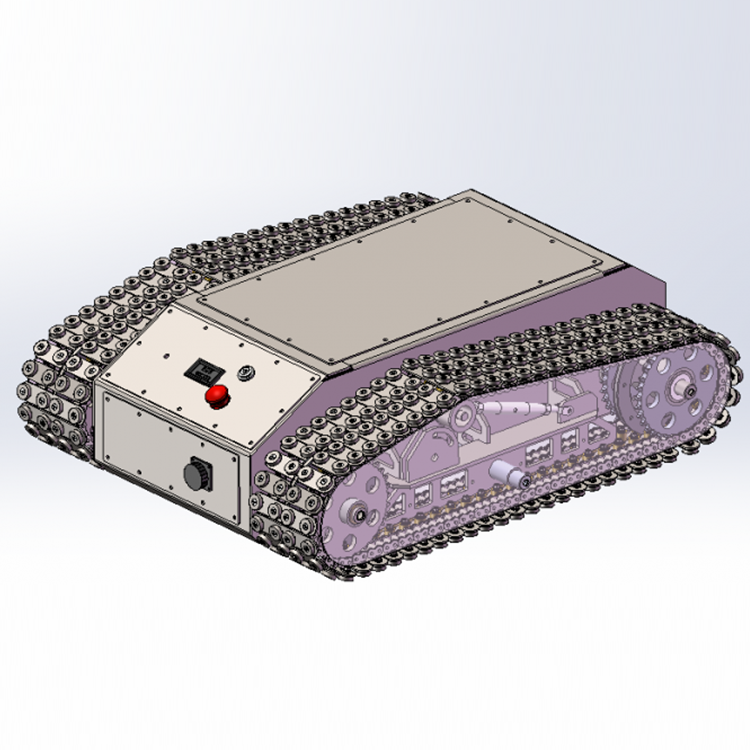
不同的机器人产品对底盘有不同的要求,如地板清扫机器人需要低成本的激光导航方案,其他服务机器人需要灵活和激光雷达+视觉导航方案,而工业AGV需要更准确的导航方案。根据不同类型的机器人底盘,排涝机器人厂家把目前市场上的机器人底盘主要分为爬行机器人和轮式机器人底盘。
轮式机器人底盘万向轮的安装方案:
1、两驱动轮不在机器人对称轴上的情况机器人比赛中常见的一种底盘结构是驱动轮在后部,即偏离了前进方向的重心。在这种情况下,通常采用的辅助万向轮安装方式足前部安装两个等高的万向轮,使其与驱动轮低点共面。该安装方法使位于机器人前部的两个万向轮与两个驱动轮构成4个支点,这种情况会导致两个万向轮不能同时着地,或者有一个驱动轮被架空,即只能同时有三个支点着地。这种情况会导致机器人在行走过程中颤动,打滑以及偏离预定位置等问题。
2、两驱动轮位于机器人对称轴上所另一种底盘常用结构是在前进方向上将驱动轮与整个机器人的重心置于一条直线上。前后各一个或多个万向轮等高安装,并保证低点与驱动轮共面。该安装方法同样出现多个万向轮不能同时着地,以及驱动轮可能被架空等问题。以至于在相似的场地情况下,驱动轮受力不同,导致驱动电机需要的驱动力矩不同,难以控制其行走出理想的路线,同时驱动轮受力相差过大。甚至会导致机器人在转弯过程或抓取任务所需物品时倾倒。